![]()
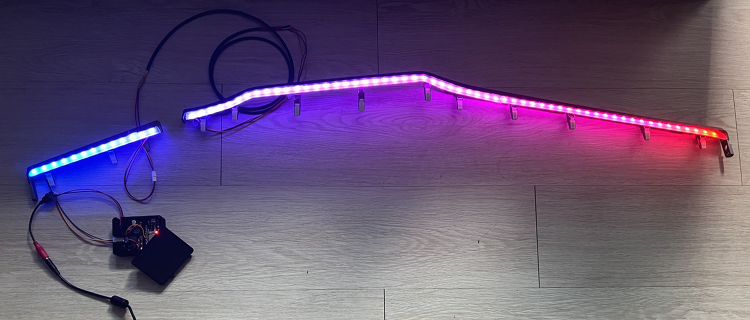
동기만으로 과업을 완수하는 것은, 그 동기가 약화될 때 쯤 난이도가 극악으로 올라갑니다. 이번 작업도 마찬가지였습니다. 이전 포스팅에서 말씀 드렸겠지만, 너무 많은 문제가 발생했고, 그것을 해결하는 과정은 고통의 연속이었습니다. 그럼에도, 다행해 머리 속 상상을 현실로 꺼낸다는 그 대의는 단순한 동기보다 더 강한 원동력을 가지고 있습니다. 덕분에 이렇게 한 걸음 씩 갈 수 있는 것 같습니다. Enclosure 설계 및 3D Printing ESP32와 XL6009 Buck-Boost 레귤레이터를 차량 트림 내부에 굴러다니게 둘 수 없습니다. 따라서, 이들이 굴러다니다 쇼트가 나서 문제를 일으키지 않도록, 또 모듈화되어 장착 / 분리가 용이하도록 커넥터를 구성하여 연결할 수 있도록 했습니다. 긴 시간 기다..
![]()
이전 이야기 NeoPixel과 ESP32를 활용해 차량 내부 인테리어용 조명, 즉 엠비언트 라이트를 달기 위해 ESP32 코드를 짜고, 간단히 앱을 개발 중이었습니다. 그러나 몇 가지 난관에 봉착하다보니 이 프로젝트를 잠정 중단하게 되었습니다. A. ESP32 과열 및 작동 불능 | 원인을 알 수 없었습니다. 1000uF 캐패시터를 추가하니 이 문제는 더이상 일어나지 않았습니다. B. 확률적으로 NeoPixel 첫 번째 소자 망가짐 | 이를 해결하기 위해 Signal line에 저항을 추가해야 할 것 같은데, 3.3v Logic Level을 가진 ESP32는 이미 NeoPixel을 구동하기에는 전압이 부족한 상태입니다. 그렇다면 로직 컨버터를 달고 또 저항을 단다? 바람직해보이지 않았습니다. 일단은 캐패..
![]()
그런데 잠깐, 널린게 RGB 제어 앱인데 뭐하러 또 만드는거야? 가장 큰 이유는 자기계발이었습니다. 예전엔 엄두도 못 냈던 ios 개발 환경이 있다면 그것을 활용해야 하지 않을까요? 또한 현재 아이폰을 사용하고 있기 때문에, 보다 편리한 제어를 원한다면 ios 앱을 사용해야만 합니다. 그런데, 기존에 엠비언트 라이트 블루투스 연동 앱들은 하나같이 뭔가 이상합니다. 앱에 'MADE IN CHINA'가 적혀있지 않음에도, 그런 종류의 앱들은 생김새 자체에서 'MADE IN CHINA'를 울부짖고 있었습니다. 그게 싫었습니다. 그보다는, 앱에서 'Made by WKLabs'를 원했습니다. 시작은 두려움보다는 설렘으로 채우세요. 새로운 것을 시작하는데 전혀 두려워하면 안됩니다. 학교를 졸업했다고 배움에 끝이 있..
![]()
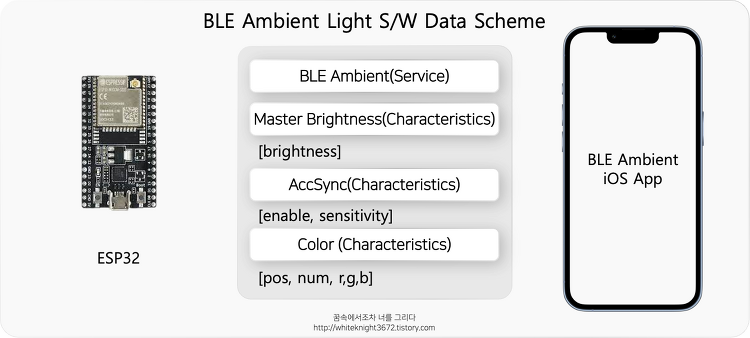
서론 엠비언트 라이트의 본격적인 제작에 앞서, H/W와 S/W 설계를 진행해보고자 합니다. H/W 부분에서는 차량과 연결될 전장 부분, Bluetooth로 제어를 담당할 ESP32, NeoPixel의 연결을 다룹니다. S/W 부분에서는 Bluetooth LE를 활용한 ESP32와 iOS 간의 통신, 그리고 데이터 구조를 다룰 예정입니다. 다음과 같은 기술적 요구사항을 가지고, 앞서 말한 내용들에 대한 간단한 설계를 진행해 보도록 하겠습니다. Requirements (H/W) LED에 안정적인 전압(5 or 12V)을 공급시켜야 함 (S/W) LED의 색은 전체적으로 제어하거나, 위치에 따라 개별적으로 제어할 수 있어야 하며, 서로 다른 색의 사이는 그래디언트 형태로 나타나야 함 가속도 센서에 따라 조명값..
![]()
차의 의미 어떤 작업을 차량에 할 때는 애정이 필요합니다. 그리고 만족감이 따라와야 합니다. 그런데 이 모든 것들의 이전에, 자신에게 차가 어떤 의미인지를 먼저 스스로 알아야 합니다. 열심히 비용을 들여 튜닝을 했음에도 만족감이 그리 오래 가지 않거나 후회하는 이유는 자신에게 차가 어떤 의미를 갖는지에 대한 고민을 먼저 하지 않았기 때문입니다. 제게 있어 차는 소중한 교통수단이기도 하지만, 비용적으로 무시 못할 부분이 있기 때문에 그냥 레일 없이 가는 KTX라 생각하고 있습니다. 그렇게까지 애정이 넘치지는 않는다는 뜻입니다. 그래서 그렇게 튜닝을 할 생각이 크지 않습니다. 그런데, 우리가 KTX를 타는 이유는 속도도 속도지만 무궁화호 대비 조금 더 쾌적한 실내도 한 몫 할 것입니다. 그렇습니다. 이왕이면..
![]()
어디에서 왔느냐가 중요한 게 아니다. 진짜 중요한 건 언제다. 새해가 되면서 우리는 수 많은 목표를 세웁니다. 헬스장 회원권을 끊거나, 금연 계획, 적금을 새로 들기도 합니다. 그런데 대부분의 목표는 좌절되는 경우가 부지기수입니다. 그렇다면 왜 우리는 세워둔 여러 가지 목표를 모두 달성하지 못 한 채 영영 다시 오지 않을 한 해를 보내버리게 되는 것일까요? 여러가지 이유가 있겠지만 저는 세운 목표를 당장 실행하는 것에 목표의 성패가 달려 있다 생각합니다. 할까 말까 고민하는 것 보다는, 일단은 해야 합니다. 목표를 세우냐 마냐가 중요한 게 아닙니다. 진짜 중요한 건, 당장 하는 것입니다. 코웃음 쳤던 R=VD, 우리는 Vivid하게 Dream중인가? 학교를 다닐 쯤에 이라는 책을 접한 적이 있습니다. 그..
![]()
나는 나의 삶의 주인일까? 코끼리를 어렸을 때부터 밧줄에 묶어놓고 기르면 그게 세상의 전부인줄 알고 자랍니다. 시간이 흘러 그 줄을 가볍게 끊어낼 수 있을 만큼 성장한 이후에도 어렸을 적 매였던 밧줄에 의해 만들어진 반경 이상을 벗어나지 않는다 합니다. 안타까운 이야기입니다. 우리는 분명히 자유의지를 가지고 태어났습니다. 그리고 자유를 가지고 살고 있다고 생각합니다. 그런데, 정말 우리는 자유로운 존재인가요? 그 줄의 두께와 투명도, 그리고 개수에 차이가 있을 뿐, 우리도 어쩌면 앞서 언급한 코끼리와 다르지 않을지도 모르겠다는 생각을 합니다. 삶을 매는 밧줄들 우리는 돈, 사회, 가족, 스스로 라는 이름의 여러 가닥의 줄에 매여 있습니다. 돈은 일을 하도록 합니다. 사회는 어떤 시기, 어떤 지위에 있는 ..
![]()
문제 인식 현재의 PC에는 수냉쿨러, NZXT 케이스의 조명 제어 시스템이 있습니다. 여기에 와이파이 모듈을 추가해야 합니다. 이 3 장치들은 모두 메인보드에 직결하는 USB 2.0 9핀 커넥터를 사용합니다. 그러나 요즘 나오는 메인보드들은 USB 2.0 포트를 추가하기보다 USB 3.0, USB-C 연결을 추가하는 모양새를 보입니다. 그렇다면, 저는 앞에 언급한 3가지 장치 중 하나를 포기해야 할까요? 이런 고민을 하시는 분들을 위한 해결책이 있긴 있습니다. 저같은 고민을 하시는 분들을 위한 제품이 internal USB Hub 혹은 splitter라는 이름으로 판매중입니다... 그래서 저도 이걸 구입하려 했습니다. 구매 버튼에 손가락이 올라가기 직전, 문득 예전에 PC를 조립할 때 기억이 떠올랐습니다..
![]()
PC를 새로 구입하다. 저는 PC를 3D 모델링, CMake 빌드, 웹서핑, 글쓰기, 간단한 Python 코딩 + 딥러닝용으로 사용합니다. 대부분의 경우는 M1 맥북으로 해결이 가능하고, 조금 부족하다 싶으면 라이젠 1600 + GTX750ti 시스템으로, 더 부족하면 클라우드를 활용해 큰 부족함 없이 사용해왔기 때문에, 살면서 PC 성능의 부족을 크게 경험해본 적이 그리 많지 않았습니다. 그러나 친구의 PC로 3D 모델링을 해 보니 제 PC의 부족함을 여실히 느끼게 되었고, 또 마침 돈을 써야만 하는 상황이 생겨 자의 반 타의 반으로 PC를 새로 구입하게 되었습니다. 이렇게 구입한 PC는 제가 지금껏 써온 PC 중 가장 높은 사양의 PC이지 않을까... 하는 생각이 듭니다. 급을 굳이 나누라 했을 때,..
![]()
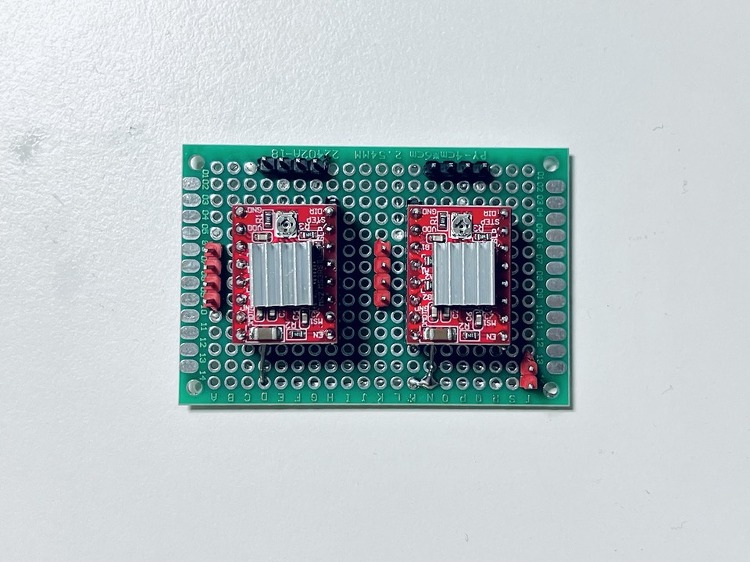
서론 AI Turret은 BB탄 총, 카메라, AI를 활용해 적을 추적하고 발사하는 시스템입니다. 이 블로그에서는 AI Turret을 제작하는 과정에 관한 이야기를 연재중에 있습니다. 이번 포스팅에서는 AI Turret이 적을 인식했을 때 추적하기 위한 Actuator을 설계에 관해 다뤄보겠습니다. 이런 부분은 관련 경험이 있거나 reference가 있으면 도움이 많이 됩니다. 그러나 저는 수평으로 움직이는 어떤 맷돌 형태의 제품은 설계해 본 경험이 없어 이 부분에 애를 좀 많이 먹었습니다. 제가 설계하고자 하는 것은 현장에서 흔히 찾아볼 수 있는 크레인의 yaw축 움직임에 가깝습니다. 그러나 관련된 정보를 찾는게 너무 어려워서 일단은 그냥 몇 번의 사고실험을 거친 후, 그럴싸해 보이도록 일단 만들어봤습..
![]()
서론 AI Turret은 BB탄 전동건을 기반으로, 카메라를 통해 적을 인식한 후 발사하는 시스템입니다. 이번 포스팅에서는 전동건을 분해하고 핵심이 되는 부품을 적출해 치수를 측정한 후 이걸 3D 모델로 옮기는 작업에 관해 다뤄 보겠습니다. BASE 모델 분해 정말 오랜만에 만져보는 실총인지라 가슴이 뛰었습니다. 군대 훈련소에서 몇 발 쏴본게 아쉬워 자대에서 그렇게 사격 보내달라고 해도 안보내줘 자대배치 받고 총 한번 못 쏜 채 아쉬운 마음으로 전역했었는데, 이렇게 보니 감회가 새롭습니다. 그런데 그 아쉬움을 달래기 위해 건전지를 구입해 BB탄을 쏴볼까도 싶었지만, 그건 또 다른 차원의 문제였습니다. 사무실에 BB탄이 굴러다니는 대참사를 일으킬 순 없었기에, 아쉬운 마음을 달래고 드라이버를 들어 분해를 ..
![]()
당신만의 AI, 함께하는 Jetson Nano A02 Jetson Nano에서 YOLOv5 사용 전 준비할 것들 Jetson Nano에 JetPack 4.6 + 필수 SW 설치 OpenCV CUDA 가속 활성화로 젯슨 나노 100% 활용하기(간단) Jetson Nano에서 YOLOv5 실행하기(0.13s, 7.7fps) 드디어. YOLOv5. (2021. 11. 01. 최초 작성) YOLOv5를 위해 JetPack 4.6, OpenCV 4.5.4 with CUDA, PyTorch 1.8, torchvision 0.9.0을 설치하는 고생을 해왔습니다. 이제 드디어 YOLOv5를 설치할 차례입니다. GitHub - ultralytics/yolov5: YOLOv5 🚀 in PyTorch > ONNX > Cor..