![]()
대망의 FC보드 제작 차례입니다. 사실 어느 것 하나 쉬운 건 없었습니다. 하드웨어, 배선, 케이싱, FC보드 제작, 카울 제작까지.. 카울 제작은 100% 미관을 위한 것이고, 전혀 한번도 시도해본 적 없는, 말 그대로 맨 땅에 헤딩하는 꼴이기 때문에 할 수도 있고 안할 수도 있습니다. 비행 성능이 원하는 대로 나와줘서 애착이 생기면 기꺼이 카울까지 제작하겠지만, 그렇지 않으면 무기한 연기할 예정입니다. FC보드의 구성과 제작 FC보드는 정말 간단합니다. 자세제어용 센서, MCU, 수신기만 있으면 되니깐요. 저는 늘 그래왔듯 자세제어용 센서로는 많이들 쓰이던 MPU-6050을 이용하고, MCU는 Arduino Uno 호환보드 제이씨넷의 JArduino - Atmega328p를 사용하였습니다. 수신기는 ..
![]()
저번 포스팅에 이어 2분만에 찾아뵙니다. 이번에는 icarus에서 가장 문제가 되었던 esc 배치에 관한 이야기를 좀 해볼까 합니다. 초기 icarus처럼 프레임에 esc를 배치하면 수월하긴 한데 안이쁘고 짧아보입니다(...) 난해하긴 해도 프레임에 esc가 있는 걸 볼 수 있습니다. 그에 반해 마지막 icarus는 esc가 전에 말했듯 중앙에 모여있는데, 볼 때마다 문어발 콘센트 보듯 마음이 참 심란해지는 모습이었습니다. 중앙 부분이 제대로 표현이 안됐군요. 이 문제도 해결하기 위해 나름 노력했습니다. 바디가 esc 배치하기는 부적절한 구조를 가지고 있어 또 고민했습니다. 미와 무게중심, 실용성 세마리의 토끼를 잡기는 좀 힘들었죠, 기존 icarus 팀원 중 누군가가 esc 전원선을 잘라버렸습니다. e..
![]()
저번 icarus 프로젝트가 끝난 후, 본체는 제 집에 남아있었습니다. 요 놈을 어떻게든 살려보고 싶은데 그때 그 모습은 답이 없었던 것 같았습니다.십자쿼드였는데, 보시면 브레드보드가 무식하게 두 겹으로 있습니다. 윗층 브레드보드는 블루투스 값을 수신해서 pulse로 변조 후 아랫층 멀티위 아두이노로 보내주는 역할을 했습니다. 그럼 아랫층 아두이노는 모터에 신호를 주고요.더 아랫층엔 극도의 minimalism을 추구한 나머지 esc를 그 좁디 좁은 공간에 다 쳐박았습니다. 덕분에 좀 더 세련된 느낌은 받았었으나, esc 모인 부분을 보면 속이 답답해질 지경이었죠. 그것 뿐입니까, 아래 배터리는 공중에 떠 있는 게 아닙니다! 그렇다고 케이블 타이에 묶인 것도 아닙니다! 글루건으로 고정되어 있었습니다. 이 ..
![]()
이카루스... 날고자 하는 열망의 대명사이기도 하지만, 다르게 보면 날고자 하는 열망에만 빠져 죽고 만 어리석을을 대변한다고도 생각합니다. 저는 팀 이름을 지을 때부터 뭔가 불안했습니다, 날고자 하는 열망이 어떤 결과를 빚어낼 지 개인적으로 회의적인 면이 없지 않아 있었거든요. 그런 불안감은 곧 현실이 되어 나타났고, 최종 연구 결과 발표 시 제대로 한 번 날지 못한 채 상처입은 날개로 날 개짓 했던 icarus는 행사들의 뒤안길로 사라졌습니다. (당시 11.1v 3s lipo 의 3개의 셀 중 하나가 맛이 가서 최대 전압이 7.4v밖에 나오질 않았었고, 모터 하나는 반쯤 맛이 갔었음) 그리고 모든 행사의 끝과 동시에 icarus는 저희 집에 썩게 되었는데, 한달 간 저는 집에 머물며 곰곰히 생각해보곤 ..
![]()
(밤에 적은거라 문법 상 오류가 았습니다. 저 범주 부분에 without those가 아니라 without them입니다. 죄송합니다.) Multiwii Arduino Uno pinmap, pin out 이라고도 하나봅니다 인터넷을 뒤져보면 적절한 자료가 없고 다들 Skemetic 같은 것만 있어 직접 제작하였습니다. A0부터 A2까지는 짐벌 장착 시 해당되는 이야기구요 이들을 어떻게 무선으로 조종하는 지는 잘 모르겠습니다. 일반 multicopter용 RF 혹은 2.4GHz Receiver는 roll, pitch, yaw, throttle, 기타 1-4개의 AUX 정도만 지원하는 걸로 알고있거든요 A3핀은 쿼드콥터 배터리와 연결해서 Status, 그니깐 전압을 확인하는데, 3s 기준 11.1v를 5v ..
![]()
이번 시간에는 multiwiiconf를 볼 차례입니다. multiwiiconf는 폴더 안에 여러 폴더가 또 있는데, 자신의 운영체제에 맞는 폴더에 들어가셔서 multiwiiconf.exe를 실행하시기 바랍니다. 참고로 Java 설치가 선행되어야 합니다. 아, 윈도우 64비트이신 분들도 windows32에서 실행해야하나봅니다. 제 컴퓨터는 64비트인데 windows64폴더의 멀티위conf는 실행안되고 windows32 폴더의 그것은 실행되더라구요 어쨌든 실행하시면 위와 같은 모양이 뜨는데 안의 말풍선을 따라하시면 다음과 같은 모양으로 변합니다. 왼쪽 위에 여러 값들이 있는데 거기서pid 상수값을 조절하실 수 있습니다. 아래 하얀 화면에 가속도/자이로/지자계 그래프가 그려지며, 화면 우측 상단에 Virtua..
![]()
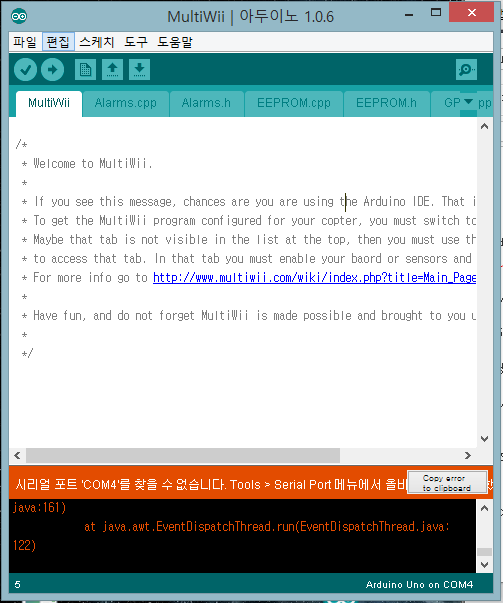
이번 설명서에서는 multiwii를 아두이노에 올리는 방법에 대해 알아보겠습니다. //준비multiwii(이하 멀티위)는 Configuration Tool과 Firmware가 같이 있습니다. http://www.multiwii.com 가셔서 멀티위 최신버전 zip 파일을 받으시길 바랍니다. 2015.02.25현재 최신 버전은 2.3입니다. 편의를 위해 따로 올려드리려 했는데 용량이 500kb 초과하는 관계로 못올리게 됐습니다. 받으시고 압축 풀면 multiwii multiwiiconf 두개의 폴더가 있을 겁니다 //시작이제 아두이노를 켜십시오.파일>열기 누르신 후 multiwii 폴더의 multiwii.ino를 여십시오. 이상하게 파일은 하나 열었을 뿐인데 탭은 되게 많이 열려있죠? 당황마시고 시리얼 모..
1.서문 이카루스 팀에서 쿼드콥터를 만드려 pid 알고리즘을 만들고 시행해봤지만, 결국 남는 건 시간이 흐를수록 강해지는 on/off 제어의 힘이었습니다. 시소놀이를 격렬하게 하더군요. 말도안되는 제어였습니다. 사실 모터 하나는 pid 제어가 가능했는데, 두 개, 그러니깐 1축을 제어하려니 답이 없더라구요. 제 힘만으론 역부족이어서 Github에 공개된 소스들을 찾아봤지만, 별 도움은 되지 못했습니다. 6개월의 연구 기간동안, 꼬박 4개월을 pid 알고리즘 연구에 몰두했는데, 얼마 전 multiwii라는 오픈소스 쿼드콥터 소프트웨어를 발견하게 되었습니다. 아두이노를 기반으로 하고 있으며, 다양한 센서(여러 종류의 가속도/자이로/지자계 센서는 물론, gps까지 지원합니다) 들을 지원하기 때문에(사실 MPU..
![]()
학교에서 동아리를 하며 피지컬 컴퓨팅을 어떻게 하면 한번에 알 수 있을까 고민했습니다. 이게 원래 아두이노를 동아리에서 활용할 목적이었는데 이게 어쩌다 보니 주제가 변질되어 쿼드콥터 제작까지 오게 되었네요. 개인 프로젝트가 아니라 이번엔 팀 프로젝트입니다. 이카루스. iCarus 팀원5명에 아두이노 2명안드로이드 앱 개발 2명제작 1명 ..이긴 한데 조금 역할이 조금 변질되어서아두이노 1명 안드로이드 앱 개발 1명제작 2명..?프리랜서 1명 저 프리랜서가 바로 접니다.앱 개발스케치 개발 제작까지. 조악한 동아리 발표대회에서 시작해서 부품 조달해서.. 구입을 했는데 쿼드콥터 사양은 다음과 같습니다. 925kv bldc모터*4ZIPPY Max 3000mAh 11.1v 20C*1ipeaka 22A ESC*4A..