![]()
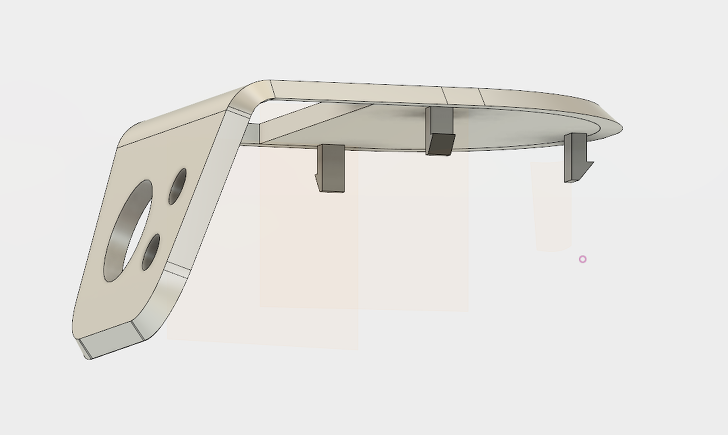
Cockpit. 이것저것 신경써야 할 부분들이 많지만...일단은 손잡이를 Cockpit, Head, Body 세 파트로 나누고분해/ 결합할 방법을 구상하고 있습니다. *cockpit은 조이스틱을 장착하게 될 위 형태의 부품을 의미합니다. 지금 생각하고 있는 형태는 자동차 인테리어 부품 장착하듯부품에 키를 만들어서 장착하는 것입니다,정리하자면 결국 걸쇠 형식으로 구성해 장착하는 것인데.. fusion 360을 돌릴 수 있는 pc를 쉽게 쓰기 어려운 상황이기도 하고토익 LC와 PT면접이 겹친 상황이라짐벌을 빠른 시일 내에 쉽게 마무리할 수 있을지는 모르겠습니다. 그렇지만 9월까지 모든 모델링을 끝내고 2학기 중으로 모델링한 것을 3D프린팅할 계획입니다. Head & Body 원래는 볼트를 짐벌 손잡이 방향(..
![]()
조금씩, 조금씩..아이가 걸음마를 연습하는 기분으로 Fusion 360을 만집니다.아직 익숙하지는 않지만 기능들을 감으로 느끼고 내것이 될 때까지 연습하며원하는 모델링의 형상을 잡아갑니다.loft 기능이 제가 원하는대로 작동하지 않아서 어떻게 손잡이부분을 해결할까 고민 많이했습니다.그러다 plane을 많이 만들어 각 plane마다 타원을 그려 loft시켰습니다.별건 아니지만 은근히 노가다이기도 하고, plane을 사용하는 방법을 알아가는 첫걸음이기도 했죠. 3D모델링 실력의 정수는 아이템을 배치하는 공간지각능력도 있지만, 그걸 적용하는 측면에서는 plane을 잘 활용하는 것이 중요하다는 것을 깨닫게 되었습니다. 사실 요즘은 3D모델링이 예전에 비해서는 상당히 쉬워진 편입니다. 스케치업에서 밑면 그리고 밀..
![]()
저번학기때 오토캐드 수업을 정식으로 배웠었습니다.중간에 잠도 많이 잤지만 실습시간만큼은 제대로 했던 지라 조금의 노하우와 요령이 쌓여있는 상태입니다. 종강하고 아르바이트를 하며 간간히 Fusion360을 만지작거리고 있습니다. 3D모델링 예제를 제가 많이 접해보지 못했고, 모델링 가이드라인이 안잡혀있습니다.그래서인지 모델링을 해도 중심축이 자꾸 바뀌고 3D모델링에서 생기는 새로운 문제점을 해결할 방법을 찾기 어렵네요..유튜브 보며 공부좀 더 해야겠습니다..ㅠ 윗부분은 어느정도 모델링되어있는데 아랫부분 곡선처리가 쉽지 않습니다loft기능이 생각한대로 작동하지만은 않네요 모처럼의 휴일을 이렇게 날려먹고 난관에 부딪힌채 글남깁니다. 묻어두고있다 다음 주말에 또 꺼내봐야겠습니다. 감사합니다.
학기가 드디어 종강을 향해 갑니다. 방학이 시작되니 이제 슬슬이제 슬슬 짐벌도 다시 시작할 때가 되었군요.제가 잠시 중단한 짐벌 제작 역시 다시 새로 시작해야겠죠.. 우선 앞선 포스팅에서 micro storm32보드는 POT포트를 지원하지 않고, 그렇기때문에 조이스틱을 직접 연결할 수 없다는 결론을 내렸습니다. 그럼 이 상황에서 제가 해야할 해결 방법은1. 조이스틱을 포기한다(기능 포기)2. 풀사이즈의 레퍼런스 storm32보드를 사용한다. (심미성 포기)3. 아두이노를 일종의 ADC로 사용하고, 아두이노의 기능을 활용해 배터리 잔량 등의 추가 정보를 표시한다.(시간 포기) 이렇게 3가지의 선택지가 남게 되었습니다.저는 여기서 결국 3번째 길을 선택하게 되겠죠..아두이노 Pro Mini 사용할 예정인데,..
![]()
핸드헬드 짐벌의 특장점이자 가장 우선시해야할 것은"휴대성"입니다.아무리 좋은 핸드헬드도 덩치가 크다면 아무나 쓰기는 어렵죠.그렇기에 일반에서 뛰어난 성능의 DJI Robin같은 짐벌보다는 Osmo, 지윤텍 Z4같은 것이 더 유명한 것이겠죠.그리고 이렇게 핸드헬드 짐벌의 경우는 소형화가 곧 기술의 핵심이 되기도 합니다. 그렇기 때문에 제가 만들고 있는 이 짐벌도 소형화를 지향하고 있죠.사이즈를 최대한 줄이면 두께 포함해서 일반적인 책 사이즈정도 나올 것 같습니다.(500페이지 분량 책 두께)이정도면 미러리스 카메라와 같이 들고 다닐만 하죠.다만 나중에 렌즈를 추가로 구입 했을 때 어떻게 될지는 모르겠습니다.모터가 버텨주기는 어렵겠죠? 그 땐 그냥 지윤텍 구입하렵니다..ㅋ 어쨌든 소형화, 소형화가 가장 중요..
![]()
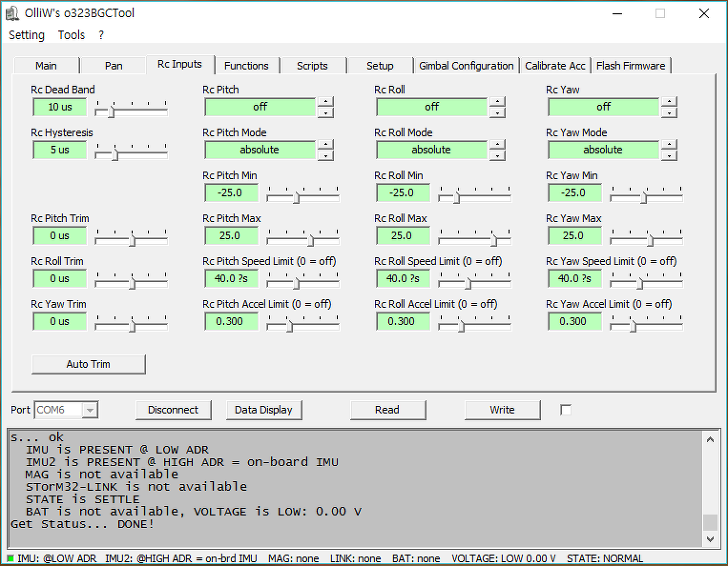
시작하기Olliw's Storm32 올리우스 스톰 32는 오픈소스로 제공되는 짐벌 제어 소프트웨어입니다. 이 문서는 해외 개발자 Olliw의 프로그램에 대한 한글 버전 설명서로, 개인이 만든 것이므로 설명서에는 어느 정도의 오류가 있을 수 있는 점 양해 바랍니다.본 설명서는 Olliw's Storm32 GUI 0.82e 버전을 대상으로 하고 있고, 대상 보드는 micro storm32보드를 사용합니다. 다른 보드 및 다른 버전에서는 사용법이 달라질 수 있습니다. 부족한 부분이나 궁금한 부분에 대해서는 댓글을 통해 지적이나, 보충, 질문해주시면 감사하겠습니다. *스톰 32보드에 입문하는 한국인 사용자를 대상으로 만들었고, 짐벌 세팅과 초기 설정에 대한 설명 위주로 진행할 예정이고, 추후 버전(~0.96 혹..
![]()
i2c 문제가 일어나는 학문적인 이유에 대해서는원래 저라면 찾아봤겠지만...짐벌이 eager보단 chore에 가까운 일로 전락해버린지라...나중에라도 흥미가 생기면 찾아보렵니다. 다만 i2c 문제를 해결하는 데는 여러가지 방법이 있습니다.저번에 말했듯 i2c 케이블을 꼬아(twist)주거나,쉴드 선을 장착하거나,아니면 더 확실한 방법으로는 페라이트 코어를 사용하고, 최후의 방법으로 NT모듈을 사용하는 것으로 i2c 에러를 없앨 수 있습니다.NT모듈은 통신 방식자체가 i2c가 아닌 시리얼 통신으로 에러가 거의 나지 않죠. 어쨌든 저번에 블로그를 포스팅하면서 문득 쉴드된 선을 생각해보다 보니,삼성 마이크로 usb 케이블이 떠올랐습니다.제가 애용하는 케이블인데요. 어지간한 천원짜리 사서 갈아치우는 것보다조금 ..
![]()
이번에 온 것은 역시, 정상입니다. 역시 설명서에 0.68버전 펌웨어가 올라가있다 해놓고 0.82e 펌웨어가 올려져있는거나,2015/04/14에 제작된 거나, 이전 보드랑 완전 같은 제품입니다.그럼 이 보드를 새로 장착하기 위해 기존에 거추장스럽게 달려 있던 SimpleBGC를 제거해보겠습니다.사실 요녀석도 되게 쓸만하긴한데 등치가 있고, 2축만 잡아준다는게 아쉬울 뿐인거죠. 급한대로 만들거나 드론에 단다면 써먹을 수도 있긴 합니다.다만 제가 이제는 diy 드론에 손을 뗐다는 게 문제죠.요새는 시판용 드론이 diy보다 잘나와서 굳이 diy가 필요없는 것 같습니다.마치 초기 스마트폰을 루팅시키고 사용했지만, 성능이 올라가면서 요새는 그런 게 좀 덜한 것처럼 말이죠.어쨌거나, 나사를 풀고 분해해주면 이렇게,..
![]()
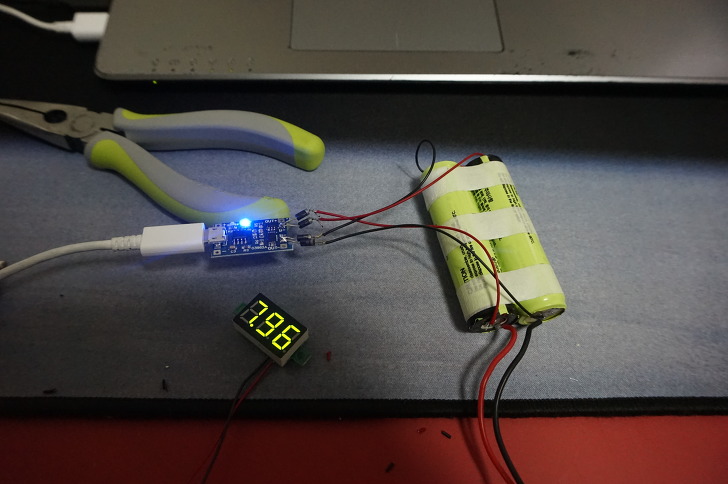
좋은 새해입니다.새해에도 저는 짐벌을 제작하고 있죠...실은 12/25, 12/28일정도에 모터와 micro storm32보드가 와서, 일을 다시 진행할 수 있게 되었습니다.연말을 보내고, 이제 조금 짬이 나는군요.모터에 대해 언급이 되지 않았던 것 같은데, 모터는 쓰다보니까 죽더군요(..)왠지 simpleBGC로 pid조정할 때 파워를 너무 줘서 과열로 사망한게 아닌가 싶은 생각이 듭니다.이번에 구입한 모터는 RCTimer가 아닌 iPower 모터를 구입했습니다.사실 다 그게 그거인 중국산이지만 뭔가 iPower는 각인이 더 잘되있더라구요. 순전히 외적인 문제로 고르게되었습니다. (알리라 뭔가 마음 편한 것도 있었죠.)어쨌든 조금씩 발전하는 모습, 이제부턴 보여드릴 수 있게 되었습니다. 이번엔 전원에 ..
![]()
저번의 치명적인 실수로(...) 마이크로 스톰32보드를 날려먹고 참 많은 고민을 했었습니다.이제 어떻게 해야하나...하다가 문득 예전에 테스트용으로 구입한 뱅굿산 2축 짐벌이 떠올랐습니다. 이름은 Eachine Light-2D였고. SimpleBGC 8bit 2.2버전으로 작동하는 제품이었습니다.2202모터를 쓴지라 힘이 턱없이 부족하다는 소릴 듣죠. 그래도 가격이 약 30달러에 불과해 싼맛에 쓰긴 합니다.하지만 전 고프로급 카메라가 없어 받자마자 창고로 보냈었습니다.근데 이번에 문득 떠오르길래 BGC만 빼서 우선 한번 써보기로 합니다. 마이크로 스톰32보드를 구입하고 배송될 2주의 시간동안 이 8bit SimpleBGC 보드로 pid값을 구할 계정입니다.기존 micro storm32보드가 있었어야 할 ..
pid 제어는 원하는 값에 도달하기 위한 기초적인 자동 피드백 제어 방법 중 하나입니다. pid제어를 위해서는 몇가지 요소에 대한 정의가 필요합니다.e(t) : 오차값이라 부르고, 목표값에서 현재값을 뺀 값입니다.MV(t) : 제어량이라 부르고, 현재값에서 목표값에 도달하기 위해 제어기에 줄 값을 의미합니다. 알고리즘은 다음과 같습니다.MV(t) = Kp*e(t)+Ki*(integral)e(t)+Kd*(derivative)*e(t)PID제어는 사실 위키백과에 생각보다 설명이 잘 되어 있어 놀랐습니다.문서에서 괜찮은 그래프가 있길래 하나 가져와봤습니다.PID에 대한 내용은 이거 하나만으로 모두 정리될 것 같네요.그래프를 참조하면서 읽으시면 도움이 크게 됩니다. P제어P : Proportion제어는 오차값만..
![]()
이번엔 짐벌을 카메라에 장착하고, BGC를 장착해보겠습니다.고민해본 결과 짐벌을 카메라에 장착하는데는 기본적으로 모든 카메라에 달린 1/4" 마운트 홀을 이용하면 됩니다.거의 공용 규격이라 안맞을 걱정도 없구요.(3/8"규격도 있긴한데 일반적인 상황에서 쓰진 않습니다..^^)우선 카메라를 장착하고서 세워둘 필요가 있을 것 같아 나무 합판에 yaw축을 고정시켜뒀습니다. 카메라에 1/4"홀을 이용해 고정시키는데는 두 가지 방법이 있었습니다.하나는, 짐벌에 퀵슈를 장착하는 방법또 하나는, 마운트를 만들어 직접 고정시키는 방법이었죠. 전 카메라를 들고다니면서도 사용하고,짐벌에 장착해서도 사용할 예정이었습니다.그걸 염두에 두고 생각해보면,마운트를 만들어 직접 고정시키는 것이 퀵슈를 다는 것보다 편하다는 생각이 들..