
서론
AI Turret은 BB탄 총, 카메라, AI를 활용해 적을 추적하고 발사하는 시스템입니다. 이 블로그에서는 AI Turret을 제작하는 과정에 관한 이야기를 연재중에 있습니다. 이번 포스팅에서는 AI Turret이 적을 인식했을 때 추적하기 위한 Actuator을 설계에 관해 다뤄보겠습니다.

이런 부분은 관련 경험이 있거나 reference가 있으면 도움이 많이 됩니다. 그러나 저는 수평으로 움직이는 어떤 맷돌 형태의 제품은 설계해 본 경험이 없어 이 부분에 애를 좀 많이 먹었습니다. 제가 설계하고자 하는 것은 현장에서 흔히 찾아볼 수 있는 크레인의 yaw축 움직임에 가깝습니다. 그러나 관련된 정보를 찾는게 너무 어려워서 일단은 그냥 몇 번의 사고실험을 거친 후, 그럴싸해 보이도록 일단 만들어봤습니다.

일단 제품의 외부를 헬리컬 내접 기어로 감싸고, 위에 스텝모터를 다는 방식입니다. 스텝모터에는 마운트를 만들어 넣어주고, 스텝모터와 헬리컬 기어 사이에는 또 다른 판이 장착되어 두 부품이 분리되어 움직이도록 설계했습니다.
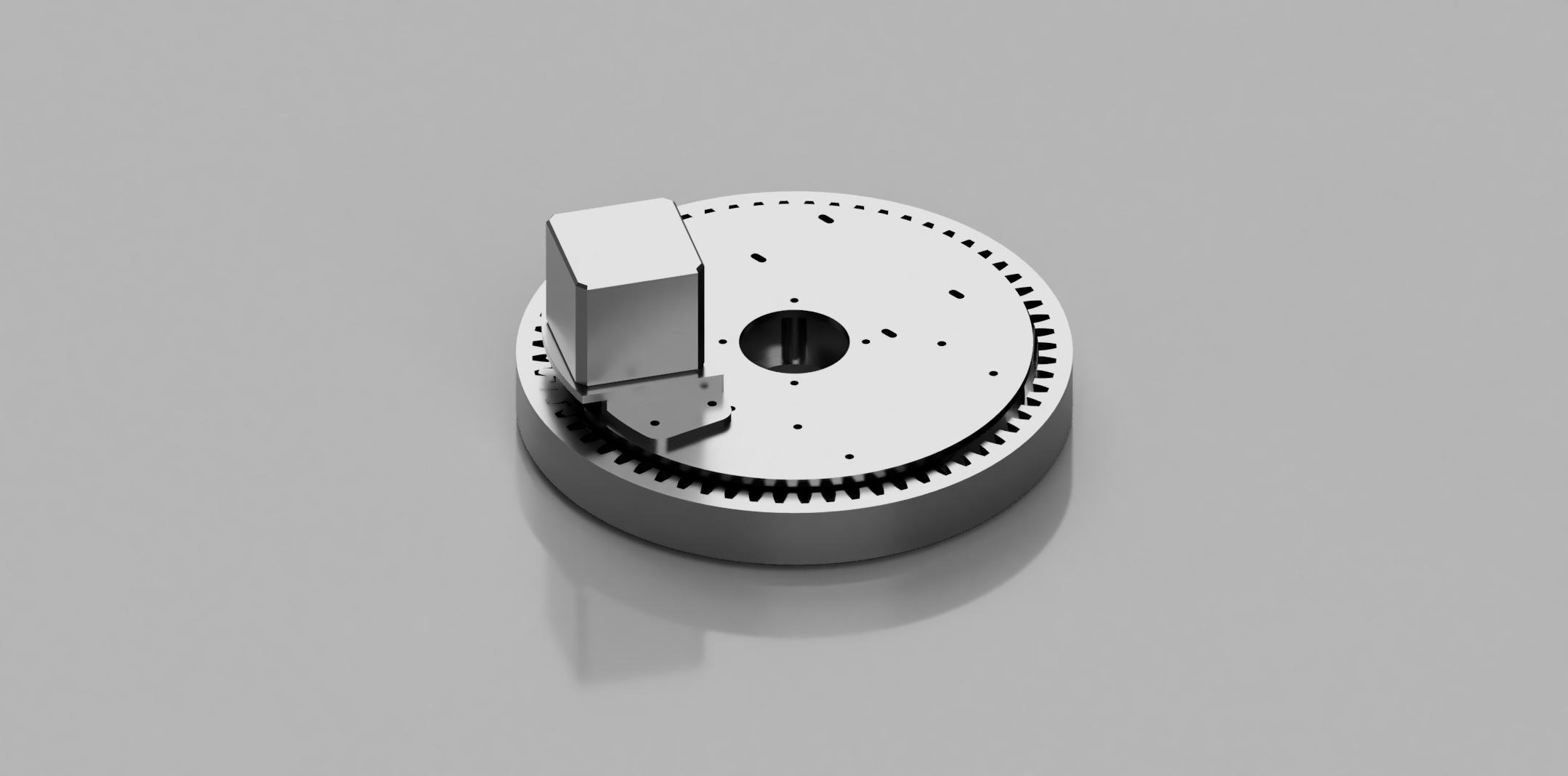
내접기어 설계를 위해 이것 저것 찾아보니 쓸만한 자료가 없었습니다. 분명 내접기어라 하면 스퍼 기어를 거꾸로 뒤집은 형태여야만 할 것 같은데, Fusion360 Add-In을 보면 그냥 도넛 형태의 제품에 스퍼기어만 뺀 형태라 이게 잘 작동할까? 하는 의문이 들었습니다. 그렇다고 오랜 시간을 들여 기어 하나 붙잡고 있기에는 시간이 부족했습니다. 그래서 그냥 Fusion360의 GF Gears Add-in을 활용해 헬리컬 스퍼 기어와 헬리컬 내접기어를 제작했습니다. CNC라면 이야기가 달라졌겠지만, 제대로 작동 안하면 또 다시 출력하면 되기 때문입니다.
이런 종류의 만들기는 MVP를 빨리 만들어야 합니다. 소소한 부분에서 붙잡고 있으면 년 단위의 오랜 시간이 걸리는데, 하나의 물건을 가지고 년 단위로 잡아먹으면 그 때부터는 조금 인생의 낭비라는 생각이 듭니다.
마치며
위에 이것저것 달고 밑에 Jetson Nano 마운트만 달면 완성인데 말이 쉽지 실제로는 크기 등 여러 제약사항때문에 쉽지 않습니다. 다음 포스팅에서는 pitch 제어를 위한 Actuator 관련 글을 들고 돌아오겠습니다.
긴 글 읽어주셔서 감사합니다. ❤️와 광고 클릭으로 고마움을 간단히 표현할 수 있습니다.
개발환경 | Mac OS 15.0 Monterey, Python 3.9, ESP-IDF v4.3, EasyEDA 6.4.24
개발환경(Jetson Nano) | JetPack 4.6[L4T 32.6.1], Python 3.6.9, PyTorch 1.8.0, torchvision 0.9.0, OpenCV 4.5.4 with CUDA
제품 개발 및 기타 문의 | dokixote@wklabs.io 혹은 오른쪽 아래 채팅을 통해 문의
서론
AI Turret은 BB탄 총, 카메라, AI를 활용해 적을 추적하고 발사하는 시스템입니다. 이 블로그에서는 AI Turret을 제작하는 과정에 관한 이야기를 연재중에 있습니다. 이번 포스팅에서는 AI Turret이 적을 인식했을 때 추적하기 위한 Actuator을 설계에 관해 다뤄보겠습니다.
이런 부분은 관련 경험이 있거나 reference가 있으면 도움이 많이 됩니다. 그러나 저는 수평으로 움직이는 어떤 맷돌 형태의 제품은 설계해 본 경험이 없어 이 부분에 애를 좀 많이 먹었습니다. 제가 설계하고자 하는 것은 현장에서 흔히 찾아볼 수 있는 크레인의 yaw축 움직임에 가깝습니다. 그러나 관련된 정보를 찾는게 너무 어려워서 일단은 그냥 몇 번의 사고실험을 거친 후, 그럴싸해 보이도록 일단 만들어봤습니다.
일단 제품의 외부를 헬리컬 내접 기어로 감싸고, 위에 스텝모터를 다는 방식입니다. 스텝모터에는 마운트를 만들어 넣어주고, 스텝모터와 헬리컬 기어 사이에는 또 다른 판이 장착되어 두 부품이 분리되어 움직이도록 설계했습니다.
내접기어 설계를 위해 이것 저것 찾아보니 쓸만한 자료가 없었습니다. 분명 내접기어라 하면 스퍼 기어를 거꾸로 뒤집은 형태여야만 할 것 같은데, Fusion360 Add-In을 보면 그냥 도넛 형태의 제품에 스퍼기어만 뺀 형태라 이게 잘 작동할까? 하는 의문이 들었습니다. 그렇다고 오랜 시간을 들여 기어 하나 붙잡고 있기에는 시간이 부족했습니다. 그래서 그냥 Fusion360의 GF Gears Add-in을 활용해 헬리컬 스퍼 기어와 헬리컬 내접기어를 제작했습니다. CNC라면 이야기가 달라졌겠지만, 제대로 작동 안하면 또 다시 출력하면 되기 때문입니다.
이런 종류의 만들기는 MVP를 빨리 만들어야 합니다. 소소한 부분에서 붙잡고 있으면 년 단위의 오랜 시간이 걸리는데, 하나의 물건을 가지고 년 단위로 잡아먹으면 그 때부터는 조금 인생의 낭비라는 생각이 듭니다.
마치며
위에 이것저것 달고 밑에 Jetson Nano 마운트만 달면 완성인데 말이 쉽지 실제로는 크기 등 여러 제약사항때문에 쉽지 않습니다. 다음 포스팅에서는 pitch 제어를 위한 Actuator 관련 글을 들고 돌아오겠습니다.
긴 글 읽어주셔서 감사합니다. ❤️와 광고 클릭으로 고마움을 간단히 표현할 수 있습니다.
개발환경 | Mac OS 15.0 Monterey, Python 3.9, ESP-IDF v4.3, EasyEDA 6.4.24
개발환경(Jetson Nano) | JetPack 4.6[L4T 32.6.1], Python 3.6.9, PyTorch 1.8.0, torchvision 0.9.0, OpenCV 4.5.4 with CUDA
제품 개발 및 기타 문의 | dokixote@wklabs.io 혹은 오른쪽 아래 채팅을 통해 문의