![]()
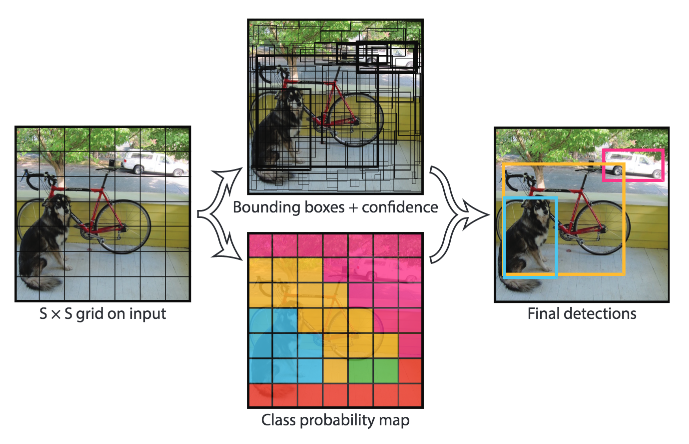
객체 탐지(ObjectDetection)이란? 컴퓨터 비전 중, 카메라를 통해 얻을 수 있는 이미지 스트림에서 물체를 인식하는 기술을 의미합니다. YOLO(You Only Look Once) 딥러닝을 통한 객체 탐지 모델은 크게 R-CNN, SSD, YOLO가 있습니다. 객체탐지 모델들이 우선적으로 당면한 문제 중 하나는, 실제 서비스를 할 수 있을 만큼 탐지 속도와 정확도를 올려야 한다는 겁니다. 정확도와 탐지 속도(mAP : mean Average Precision)는 trade-off 관계입니다. 탐지 속도가 높으면 그만큼 정확도는 낮아지고, 정확도가 낮아지면 그만큼 탐지 속도가 올라갑니다. YOLO는 괜찮은 수준의 mAP와 FPS를 가집니다. 개인 레벨에서 시범적으로 사용해보기에는 최적의 모델이라..
![]()
Raspberry Pi OS는 한계가 명확합니다. 이전 글에서 설명했듯, Raspberry Pi OS는 깔끔하고 최적화가 잘 되어 있는 OS입니다. 그러나 그 장점은 어디까지나 라즈베리파이를 교육용으로 사용했을 때 유효합니다. 저는 ROS를 사용하기 위해 라즈베리파이를 구입했습니다. 그리고 ROS를 설치해야 했습니다. ROS Wiki에는 Raspberry Pi OS에서도 설치할 수 있다고는 하지만, 알 수 없는 오류로 설치가 수 차례 좌절되면서, 라즈베리파이에 그냥 우분투를 설치하고 우분투 환경에서 ROS를 구동하는 게 더 안정적이겠다 판단해, 우분투를 설치하게 되었습니다. 이번 포스팅에서는 우분투를 설치하는 방법과, 설정 방법에 대해 자세한 설명과 옵션을 함께 포함해 설치해보도록 하겠습니다. 모든 내용..
![]()
microSD로 OS 구동은 도저히 쓸 수 없을 것 같았습니다.유튜브로 라즈베리파이 구동 영상을 봤을 땐, 생각보다 빠릿빠릿하게 돌아가는 걸 확인할 수 있었습니다. 그런데 직접 돌려보니 실사용이 불가능할 정도로 느렸습니다. 리소스 점유율도 낮은데 자꾸 프리징이 걸렸습니다. 처음엔 기계에 문제가 있나 싶었습니다. 이유를 알고 보니 A1 로고가 붙지 않은 microSD에 OS를 돌려서 그랬던 거였습니다. 일반 microSD는 랜덤IO(4k) 성능이 좋지 않아서 OS를 구동하는데 적합하지 않습니다. 따라서 랜덤IO에 특화된 A1 로고가 붙은 카드를 사용해야 합니다. 저는 이 시점에서 microSD로 OS 구동하는 걸 포기했습니다.(2020. 10. 9. 추가) A1 로고가 붙은 카드 위에 OS를 설치하면 병목..
![]()
Raspberry Pi OS는 한계가 명확합니다. 이전 글에서 설명했듯, Raspberry Pi OS는 깔끔하고 최적화가 잘 되어 있는 OS입니다. 그러나 그 장점은 어디까지나 라즈베리파이를 교육용으로 사용했을 때 유효합니다. 저는 ROS를 사용하기 위해 라즈베리파이를 구입했습니다. 그리고 ROS를 설치해야 했습니다. ROS Wiki에는 Raspberry Pi OS에서도 설치할 수 있다고는 하지만, 알 수 없는 오류로 설치가 수 차례 좌절되면서, 라즈베리파이에 그냥 우분투를 설치하고 우분투 환경에서 ROS를 구동하는 게 더 안정적이겠다 판단해, 우분투를 설치하게 되었습니다. 이번 포스팅에서는 우분투를 설치하는 방법과, 설정 방법에 대해 자세한 설명과 옵션을 함께 포함해 설치해보도록 하겠습니다. 모든 내용..
![]()
7년간의 고민 끝에 결국 구입했습니다. 라즈베리파이. 간단한 심심풀이 프로젝트로는 아두이노로 대부분의 것들을 해낼 수 있지만, 아두이노처럼 매 번 실행할 때마다 업로드를 해야한다든지 그런 문제에서 자유롭게, 조금 더 쾌적한 취미생활을 영위하고 싶다면. 라즈베리파이만한 제품이 또 없는 것 같습니다. 라즈베리파이가 시장에 나온 지 8년, 그동안 라즈베리파이는 개발 보드에서 하나의 플랫폼으로서 확실히 자리매김했다..라기보다 파격적인 성능에 파격적인 가격으로 시장의 선구자 역할을 했고, 지금도 그런 보드입니다. 저는 라즈베리파이 출시되자 저걸 한 번 사봐야겠는데...라고 입맛을 다셨었습니다. 그럼에도 구입하지 않았습니다. 큰 이유는 쓸 줄 몰라서였습니다. 어떤 물건이든 그걸 알아보는 사람에게 그 물건의 가치가 ..
![]()
백지에서 새로운 기능을 구현하는것은 어렵습니다. 그렇게 느끼는 가장 큰 이유는 어디서부터 시작해야할지 모르기 때문입니다. 우리가 지금까지 20여 년에 걸쳐 뭔가를 해결해본 경험들 중 가장 많은 비중을 차지했던건 단순한 문제들이었습니다. 그래서 저는 이전 포스팅에서 구현하고자 하는 기능을 머리 속에만 담지 말고 그 기능들을 분할하고 클래스별로 역할을 나누라는 제안을 했습니다. 그러나 클래스별로 역할을 나눠도 사실 뭔가를 하기에는 딱히 답이 나오지 않습니다. 그래서 또 하나의 제안을 하겠습니다. 구현하고자 하는 기능을 문제로 만드세요. 구현하고자 하는 기능을 문제로 만들어보면 프로그램을 제작하는데 접근하는 시각이 조금 달라집니다. 일단 '문제' 라는 건 우리가 오랫동안 풀어왔던 그 문제의 언어 형식과 비슷하..
![]()
건물을 짓기 전에는 설계를 먼저 해야 합니다. 프로그램도 마찬가지입니다. 프로그램을 제작하기 전 설계를 해야 합니다. 그건 규모와 상관 없이 중요한 일입니다. 무슨 일을 하기 전에 계획을 세우는 건 당연한건데, 저는 PyWallpaper를 제작하면서 설계 과정을 따로 거치지 않았습니다. 그랬던 것에 대한 반성 겸 이 글을 보고 프로그램을 만드는 누군가가 저와 같은 실수를 하지 않길 바라며 프로그램 구조 설계를 앞부분에 배치해서 글을 씁니다. 프로그램 구조 설계하기 - 요구사항 작성하기 백지에서 뭔가를 시작한다는 건 쉬운 일이 아닙니다. 저도 마찬가지였습니다. 저는 전문 프로그래머도 아니고 프로그래밍을 제대로 배워본 적도 없습니다. 그럼에도 이렇게 백지에서 시작하는 것은, 윈도우의 배경화면을 더 아름답게 ..
![]()
4K는 아직 시기상조인가? 하는 의문이 들 때가 있습니다. 해상도가 4K여도 마땅히 쓸만한 컨텐츠가 없다는 걸 종종 느낍니다. 저만의 느낌이 아니라 실제로 현시점에서 4K 모니터가 적절한 선택인가에 대한 의견은 사용자마다 분분한 편입니다. 찬성하거나 반대하는 입장 모두 그럴싸한 이유가 있습니다. 4K 모니터가 좋은 이유 4K 모니터가 아직 시기상조인 이유 - 32인치 모니터에는 4K가 적절합니다. FHD는 너무 흐릿합니다. - 4K 컨텐츠를 이용할 수 있습니다. 4K 해상도를 통해 즐기는 컨텐츠는 FHD의 느낌과는 또 다른 경험을 줍니다. - (사무용으로 사용시) 글자가 자글거리는 느낌이 없어 좋습니다. - 화면 일부분 캡쳐할 일이 있다면 FHD 대비 4배 더 좋은 캡쳐본을 얻을 수 있습니다. - 32인..
![]()
자취 시작했다. 어떤 모니터를 살까 최근에 자취를 새로 하게 되면서 이런 저런 물건들을 많이 구입했습니다. 모니터도 생애 처음으로 구입하게 되었습니다. 제 마음 속의 워너비는 애플 프로디스플레이 XDR, Apple ProDisplay XDR 입니다. 하지만 현실은 32인치 FHD도 감지덕지인 상황에, 이상과 현실 그 사이에서 적당히 저울질을 할 필요가 있었습니다. 모니터를 구입할 땐 몇 가지 선택지를 두고 구입했습니다. 1. 가능하면 대기업 제품으로 사자. 모니터를 보는 가장 중요한 요소는 패널입니다. 대기업 제품이어도 저가형 패널을 쓸 수도 있고 중소기업 제품이어도 대기업 패널을 쓸 수 있습니다. 그런데 그 다음으로 중요한건 그 패널을 어떻게 튜닝하느냐입니다. 똑같은 패널을 쓴다면 대기업 모니터의 색이..
![]()
4K 모니터를 구입했습니다. 최근에 자취를 새로 하게 되면서 이런 저런 물건들을 많이 구입했습니다. 처음에는 한성 ULTRON 3278 QHD New 제품을 구입했었습니다. 제가 입주해서 모니터를 구입한 시기는 2월 말 - 3월 초 사이. 코로나 바이러스 여파로 인해 물건 수급에 차질이 빚어지면서 물건을 3월 말에나 받아볼 수 있게 되어버렸습니다. 그러나 저는 다른 무엇보다 모니터가 가장 필요한 상황인지라 눈물을 머금고 해당 모델 델 주문을 취소한 다음 LG 32UK50T를 구입하게 되었습니다. 4K 모니터를 구입하자, 이상한 일이 벌어졌다 (쓸데없이 눈만 높아졌다) 모니터가 4K라고 한들, 생각보다 쓸데가 없습니다(...) 유튜브로 4K 영상 몇 번 보는게 다입니다. 넷플릭스 역시 하드웨어 사양 문제로..
![]()
대부분의 디자인 일이 그렇듯이, 파워포인트 역시 노동집약적입니다. 그렇게 노력한 만큼 멋진 결과물이 나오니 그 때의 보람은 잊을 수가 없습니다. 그런데, 파워포인트는 프로그램 자체로는 안정적이고 멋진 결과물을 만들어낼 수 있는 좋은 기능들을 제공하지만, 그 자체로는 생산성이 낮은 편이라는 것을 우리는 모르고 있습니다. 그 이유는, 파워포인트 이외의 프로그램을 거의 써본 적이 없을 뿐더러, 나머지 프로그램들은 파워포인트보다 더 환경이 나쁘기 때문입니다. 파워포인트로 PPT 디자인에 입문한 사람들은 구글 슬라이드(Google Slide)나 오픈 오피스(OpenOffice), 리브레 오피스(Libre Office)로 넘어가기 어렵습니다. 파워포인트만큼 기능이 강력하지 않고, 불편하기 때문입니다. 그럼 파워포인..
![]()
세련된 디자인의 중요성 | 모방 속의 창조 아무리 좋은 아이디어도 실현하지 않으면 쓸모가 없습니다. 마찬가지로 기획과 컨텐츠가 아무리 좋아도, 이를 돋보이게 만드는 건 결국 디자인입니다. 그러나 디자인 관련 전공자가 아니고서야 좋은 디자인을 만들기 어려운 게 현실입니다. 아무것도 없이 시작하려면 타고난 재능을 가진 사람이거나, 평소 디자인에 관심이 있던 사람이 아니면 마냥 쉬운 일이 아닙니다. '모방 속의 창조' 라는 말처럼 좋은 디자인을 만드려면 좋은 디자인들을 많이 접해야 합니다. 다양한 디자인들을 접하다 보면 좋은 디자인을 보는 안목을 자연스럽게 기를 수 있습니다. Behance | 이런 저런 디자인 보기 좋습니다. Pinterest | PPT 제작할 때 특히 보기 좋은데, 좋은 색 조합이나 PPT..