짐벌이라는 장치와 엮인지도 1년이 넘어갑니다. 초기의 짐벌은 시장이 작았기 때문에, 가격은 비싸고, 성능은 그냥저냥 쓸정도에 불과했습니다. 2축 모바일 짐벌이 컨슈머용으로 풀렸을 때였습니다. 그때는 3축 짐벌의 존재 자체가 큰 메리트이자 강점으로 부각될 때였습니다. 3축에 몇 가지 성능이 더 추가되면 컨슈머용으로는 살짝 애매한 포지션의 제품이 존재하던 때였습니다. 이때는 짐벌을 구입하는 것보다는 직접 DIY하는 편이 성능상이나, Customizing, 비용적인 면에 있어 좋은 선택지였습니다. 당시 저는 다른 문제보다도 비용적인 면, 또 무언가를 만들어본다는 경험을 할 수 있다는 점을 가장 크게 보고 짐벌 DIY를 시작했습니다.
앞선 글들이 말해주듯, Alaxmos, basecamelectronic의 블로그에 괜찮은 가격조건으로 짐벌 제작 튜토리얼이 올라와 잇는 것을 보고 무작정 3t 알루미늄 판과, GBM2804모터, micro storm32 보드, 18650 배터리를 구입해 따라할 생각을 했습니다. 그러나 블로그의 글과 실제 제작과는 괴리가 컸습니다. 블로그 글과 달리 GBM2804모터는 생각만큼 힘이 세지 않았습니다. 게다가 저는 3D프린터가 없었고, 짐벌에 Alexmos보드를 장착하지 않았기 때문에 성능에서의 손실을 감수해야했습니다. 비용 절감을 목표로 했기 때문에 부품 선정에 문제가 생겼어도 일단 그대로 밀고 나갔습니다. 누군가와 이 문제에 대해 토론할 수 있는 기회가 있었더라면 이쯤에서 미러리스 짐벌보다는 액션캠 짐벌로 노선을 바꿨을지도 모릅니다. 그리고 그 편이 최소의 비용으로 최대의 효과를 낼 수 있는 방법이었을 겁니다.

GBM2804모터가 생각만큼 제 힘을 내주지 못하는 것을 깨닫게 되고, 기존에 만들어냈던 알루미늄 골격을 플라스틱으로 대체할 생각을 했습니다. 이때는 3D 프린터를 사용할 수 있었기에, 그래도 이전보다는 수월하게 제작해낼 수 있었습니다. 사실 이 과정도 쉽지만은 않았습니다. PLA소재를 실제 제품에서 사용하는 것은 처음인지라 강성에 대한 사전 정보도 전혀 구할 수 없었고, 역학적 분석도 어려워서 골격 모델링을 한 두번정도 죽쑤고 결국 이상적인 강성과 디자인 사이에서 모델링을 완성했습니다.
이렇게 제가 1년간 실패와 실패와, 실패의 연속을 거듭하는 동안, 짐벌 시장에서는 다양한 혁신들이 시도되었습니다. 모바일용 짐벌, 일체형 짐벌, VR짐벌, 각 축에 대한 보정을 하지 않는 전혀 새로운 형태의 짐벌 등등...그중에 가장 혁신적이었던 것은, 45도 짐벌이었습니다.(roll과 yaw 축 사이의 각도가 기존 90도에서 45도로 좁혀진 짐벌, 스위블모니터가 없는 카메라에서도 화면 확인이 가능) 애초에 제가 다른 수많은 짐벌 DIY 글들 중에서도 하필 basecamelectronics의 글을 본 이유도 짐벌 사용과 동시에 화면을 확인할 수 있는 유일한 DIY 프로젝트였기 때문인 것을 생각해본다면...45도 짐벌은 충분히 매력적이었습니다.
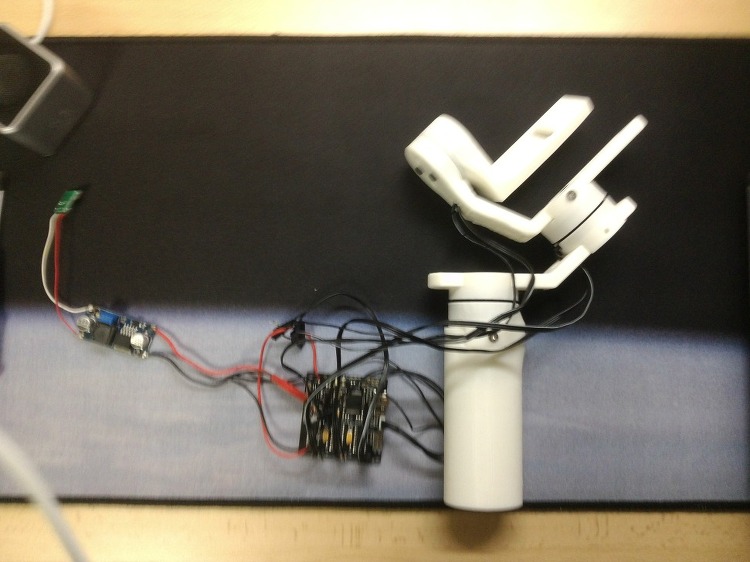
모델링을 하다 조금의 수정을 가해 45도 짐벌의 스타일을 따랐습니다. 기술상으로 구현하기 어렵지는 않지만, 혹여나 45도 짐벌 구현에 새로운 알고리즘이 적용될까 싶어서 걱정했으나, 기존 90도 짐벌 알고리즘을 가지는 storm32 보드에서도 잘 돌아가는 것을 보니 특별한 소프트웨어적 차이는 없는 듯 싶었습니다. 그래도 어찌어찌 제작해내니 마음만은 후련합니다.
우선은 3축에 대한 제어는 모두 가능합니다.
그럼에도 아직 여전히 완성이 아닌 이유는, 몇 가지 시스템에 대한 이해와 구현을 끝마치지 못했기 때문입니다.
-충전에 대한 문제를 여전히 해결하지 못했습니다. 접근 방식을 달리할 필요가 있을 것 같습니다.
-2nd imu가 적용되지 않아, 신경써서 yaw축을 이용해야합니다. 조이스틱이 달리면 큰 문제는 아닙니다.
-조이스틱이 장착되지 않았습니다. tilt 제어가 불가능합니다. 실제 영상 촬영시 큰 불편함으로 다가왔습니다.
-Gimbal Assistant를 대략 제작했지만, 공간이 부족해 장착하지 못했습니다. 요거만 장착하면 타임랩스도 사용가능했을텐데..아쉽습니다.
그래도 1년 남짓 짐벌 제작하면서 배운점도 많습니다.
-3D모델링은 이제 아무것도 아닙니다.
-충전에 대한 문제를 해결하기 위해 고민하다 릴레이의 사용법을 터득했습니다.
-모터 권선을 할 줄 알게 되었습니다.
-제가 디자인에만 너무 집착한다는 것을 알게 되었습니다. 이것은 공학자의 본분과 어울리지 않습니다.
여전히 가야할 길은 많지만, 때론 포기할 줄도 알아야 더 나아갈 수도 있는 것 같습니다. 더이상 짐벌 관련된 개선점은 없을 것으로 보이고, 다만 위에 나열한 문제 사항 보완에 대한 글 간간히 포스팅하겠습니다. 그동안 부족한 제작기 봐주셔서 감사합니다.