![]()
우선 중간에 계획을 조금 바꿨다는 점을 미리 알리고자 합니다. 에어컨과 보일러 제어에 대한 접근방법을 조금 달리 하기로 했습니다. 가장 큰 이유는 Blynk에서 IR 송신모듈을 지원하지 않아서입니다. 그리고 뭐..두번째 이유는 효용성이 떨어진다는 점입니다. 현재 상황에서 제 목적은 에어컨을 활용해 습도를 조절하고 온도를 낮추는 데 있지 도 단위로 온도를 제어해 최적의 온도를 유지하는 데 있지 않기 때문입니다. 보일러도 마찬가지로 온도를 올리고 습도를 낮추기 위해 원격 제어를 하고 싶은 겁니다. 보일러와 에어컨의 메커니즘을 이해하자. 보일러 - 현재 집에 설치된 보일러 기종에 연동된 온도조절기는 두 선으로 연결되어 있으며, 이를 이으면 그냥 계속 연속으로 동작합니다. 에어컨 - 벽걸이인지라 리모컨을 기준으..
![]()
텐서플로우를 사용하기 전에 일단 실습 환경부터 구축해보겠습니다. 텐서플로우는 기본적으로 오픈소스이기 때문에 무료로 사용할 수 있지만, 텐서플로우를 돌리는 하드웨어 자원은 무료가 아닙니다. 오프라인으로 돌린다면 pc 사양이 어느 정도는 되어야 할테고, 온라인으로 굴린다면 제한적인 자원을 무료로 사용하거나 비용을 추가해서 서버 자원 사용에 대한 비용을 지불하고 사용할 수 있습니다. 1. Anaconda 설치하기 Anaconda는 데이터 분석을 위한 툴들이 내장되어있는 패키지인데, 텐서플로우를 설치할 수 있는 가장 널리 알려진 방법입니다. 저는 개인적으로 아나콘다 윈도우 버전을 설치했다가 여러번 데였던 경험이 있습니다. 진짜 며칠동안 이거 설치하느라고 끙끙대다 포기했습니다. 그런데 어느날 OS 재설치하고 생각..
뭘 하고 지내다가 갑자기 텐서플로우를 한다는건가? "왜 나는 여기서 30만원을 받으면서 있는것인가?", "왜 나는 30만원밖에 못 받으면서 열심히 혼나고 일하고 하는 것인가?" 군 복무를 하는 내내 머리 속을 떠나지 않는 질문들이었습니다. 해답은 스마트홈에 관한 생각을 하면서 잠시간 저 질문을 잊는 걸로 끝냈습니다. 가치 없이 시간을 보낼바에 부대 안에 있는동안 기획하고 휴가 가서 구현하자!라는 생각으로 군 복무 초기 - 일병 초 - 쯤부터 스마트홈에 관해 계속 생각해왔습니다. 여러 번의 훈련을 해내고, 어느순간 스마트홈에 관한 생각이 사라졌습니다. 그도 그럴 것이 스마트홈을 만들어낸다는 건 크게 고민을 통해 성장을 만들어내는 주제가 아니기 때문이었습니다. 그런데 스마트홈에 대한 생각이 사라지는 시점은 ..
![]()
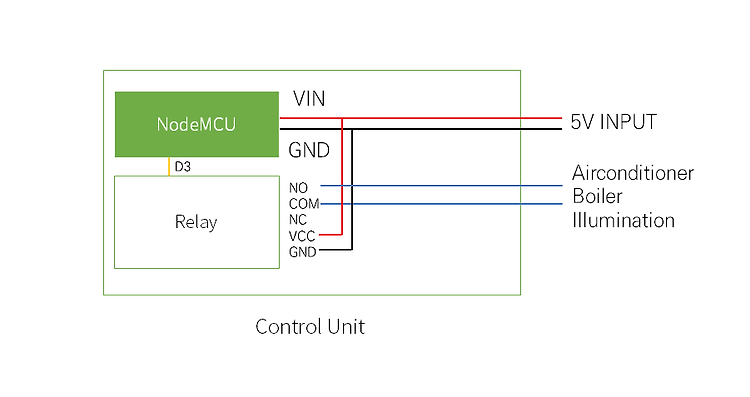
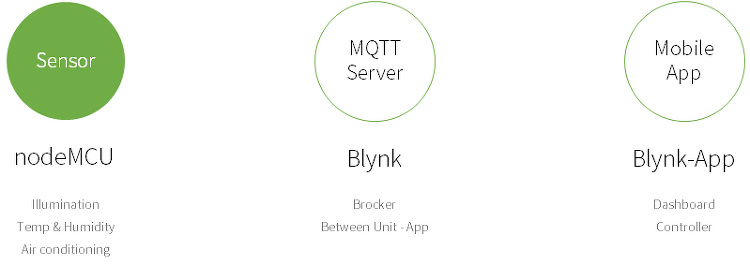
하필 Blynk를 사용하려는 이유는? 이번 프로젝트에서는 간단하게 Blynk 플랫폼을 사용해서 스마트홈을 구성해보도록 하겠습니다. 완벽하게 독자적인 플랫폼을 만든다면야 더할나위 없이 좋겠지만 Blynk 플랫폼을 이용하는 게 제 시간안에 프로젝트를 끝낼 수 있는 방법입니다. Blynk 플랫폼을 이용하지 않는다면 저희는 위 그림대로 라즈베리파이를 추가로 구입하고 라즈베리파이 위에서 굴러가는 mqtt서버를 만들고, 이 서버와 통신하는 안드로이드 모바일 앱을 만들어야 합니다. 라즈베리파이를 사서 mqtt만 굴리기는 또 뭐하니까 Google Assistant도 좀 설치해주고, 데이터도 차곡차곡 모아보는 걸로 합시다. 행복회로를 좀 더 돌려서 데이터가 쌓이는대로 AI를 적용해 훈련을 좀 시켜보는 것은 어떨까요? 가..
![]()
왜 이런 생각을 하게 되었는가? 집에 저 혼자 살게 되면서, 집을 관리해야 할 책임을 지게 되었습니다. 제가 책임질 집은 시골에 있는 오래된 집으로, 겨울이면 큰 창으로 단열이 잘 되지 않고 여름 장마철이면 습기가 벽지를 타고 올라오는...손이 많이 가는 집입니다. 이런 집은 누군가 꼭 살아줘야 합니다. 거주자가 온습도를 조절하거나 적절하게 환기를 함으로써 습기가 들어와도 빼주는 역할을 맡아야 하기 때문입니다. 그러나 저는 군인인지라, 그럴 수가 없습니다. 휴가를 아무리 자주 나와서 50일에 한 번씩 집에 들어온다 해도 50일 동안 환기를 시켜주지 않으면 장마와 태풍이 휩쓸고 지나가서 습기가 빠지지 않아 집에 곰팡이가 슬기 딱 좋은 환경입니다. 이 걱정을 작년 가을쯤부터 해와서 대책을 좀 세워보고 싶었는..
![]()
짐벌이라는 장치와 엮인지도 1년이 넘어갑니다. 초기의 짐벌은 시장이 작았기 때문에, 가격은 비싸고, 성능은 그냥저냥 쓸정도에 불과했습니다. 2축 모바일 짐벌이 컨슈머용으로 풀렸을 때였습니다. 그때는 3축 짐벌의 존재 자체가 큰 메리트이자 강점으로 부각될 때였습니다. 3축에 몇 가지 성능이 더 추가되면 컨슈머용으로는 살짝 애매한 포지션의 제품이 존재하던 때였습니다. 이때는 짐벌을 구입하는 것보다는 직접 DIY하는 편이 성능상이나, Customizing, 비용적인 면에 있어 좋은 선택지였습니다. 당시 저는 다른 문제보다도 비용적인 면, 또 무언가를 만들어본다는 경험을 할 수 있다는 점을 가장 크게 보고 짐벌 DIY를 시작했습니다. 앞선 글들이 말해주듯, Alaxmos, basecamelectronic의 블로..
![]()
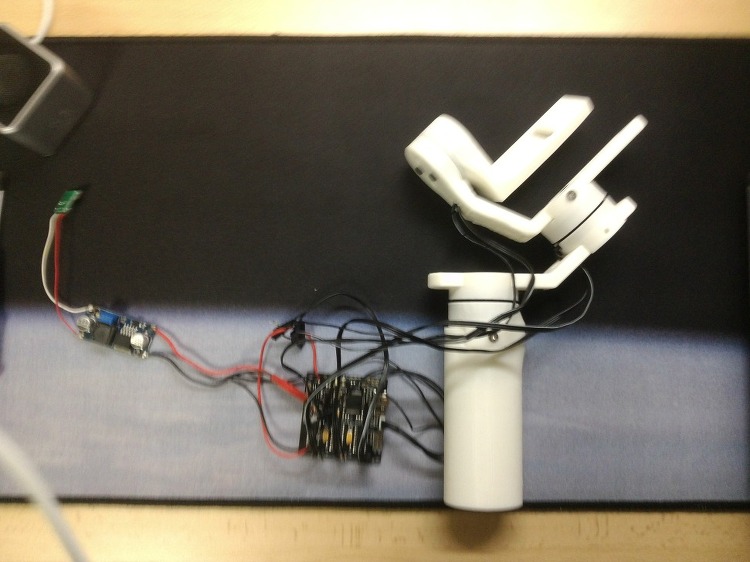
모터 고장한 1년동안 수십 번의 조립과 분해를 반복하다 보니 짐벌 모터에 감긴 코일과 짐벌 모터에 연결된 선이 떨어졌습니다. 모터를 분해해서 선을 다시 납땜해주면서 썼으나... 한두번 그러다보니 분해과정에서 코일을 잘못 건드렸는지 선을 연결해도 멀티미터 상에서 비정상적인 값을 보여주며 오작동합니다. 알리익스프레스에서 주문해도 2주는 걸리니까...한숨 푹 쉬고 선을 풀었습니다. 말로만 듣던, 무시무시한 권선을, 그렇게 하기 싫었던 권선을 하기 시작했습니다. 우선 모터의 스펙을 확인해봅니다. 에나멜선 두께 0.19mm, 0.1ohm, 12N14P(12 Stators, 14Poles), 100턴입니다. 12개의 Stator 모두 감는데 1200번만 하면 되겠다 싶어 0.2mm 에나멜선을 주문해 한땀한땀 조심히..
![]()
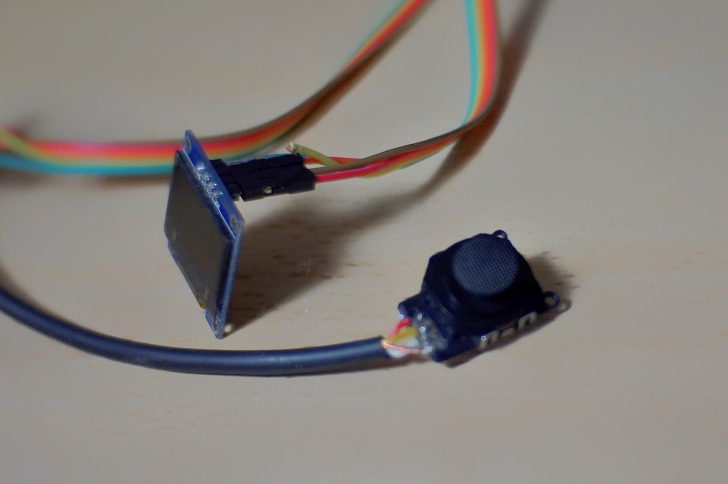
저번 포스팅에서는 짐벌의 작동을 돕기 위한(...) Gimbal Assistant에 필요한 기능을 대략적으로 생각해봤고, 기본적인 인터페이스를 구성해 봤습니다. 중간의 문구를 Recording으로 할까, 아니면 Stablizing으로 할까, 아니면 Time Elasped 로 할까가 지난 번 포스팅에서의 가장 큰 고민거리였습니다. 결과적으로, 아래에 스톱워치가 굴러가기 때문에, Time Elasped 문구가 가 가장 적절할 것으로 보았고, 아마 인터페이스의 메인 화면은 Time Elasped가 장식하게 될 것 같습니다. 조이스틱 Joystick이번에 다룰 내용은 ‘조이스틱’에 관한 내용입니다. 조이스틱은 xy에 대한 입력을 받는 장치로, 일종의 가변저항과도 같습니다. 지금 만드는 짐벌에서는 팬과 틸트 기능..
![]()
Gimbal Assistant 아두이노를 통해 짐벌 어시스턴트를 만들 계획을 잡았으니, 세부적으로 뭘 해야 하는지에 대한 계획이 필요할 것 같습니다. 우선 필요한 기능은 크게 아래의 5가지로 나누어질것 같습니다. 아마...5번 기능은 구현하기 어려울 것 같다는 생각이 자꾸만 듭니다만.. 제가 NT 모듈의 기능을 완벽히 이해하고 있는 상황도 아니고, 괜히 아두이노를 NT 모듈로 개조한다 하더라도 배선이 복잡해질 여지가 있어서 5번 기능은 고민을 좀 해봐야 할 것 같습니다. *짐벌에 필요한 기능들: 1. 촬영 경과 시간 표시하기 2. 배터리 전압 표시하기 3. 배터리 잔량 퍼센티지로 표시하기 4. 조이스틱 방향 표시하기 5. 2nd imu의 값을 받아 nt로 bgc에 전달하기 이번 포스팅에서는 가장 기본 중..
![]()
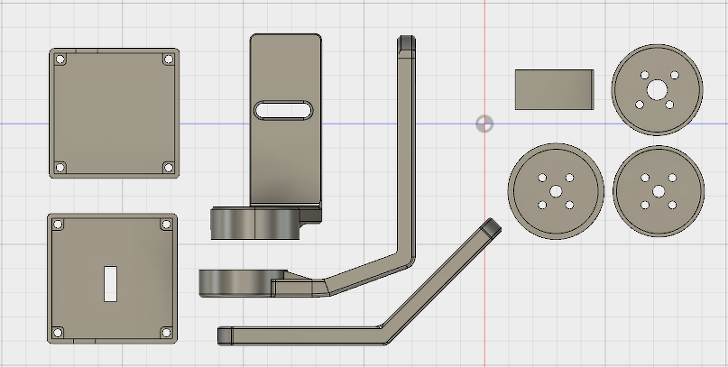
짐벌 모델링이 완성되었습니다. 이로서 거의 3 종류의 모델링을 시도한 셈이 되었는데요. 일자로 따지자면 거의 한달에 가까운 시간을 짐벌 모델링에 쏟아부은 것 같은데, 뒤돌아보면 이것때문에 참 많은 스트레스를 받았던 것 같습니다. '왜' 나는 이런 것을 하고 있을까 하면서도 노트북을 켜면 다른 건 다 제쳐놓고 저는 어느샌가 마우스 휠을 굴리며 모델링을 하고 있으니...미칠 노릇이었죠. 그러면서도 유의미한 진전은 보이지 않고 그 뒤에 있을 보상조차도 없는 이 깜깜한 길을 걷는 게... 쉽지는 않았습니다. 어느순간부터는 그렇기에 더 쉬지않고 달려 빨리 이걸 끝내야겠다는 생각만이 남은 것 같았습니다. 그러다 보니 중간에 놓치고 가는 것도 생기고 정말 필요한 것을 찾지 못한다는 느낌이 들었습니다.쉬어 갈 시간이 ..
![]()
현재 모델링 완료되어 3D 프린팅 가공 의뢰 맡겨둔 상태입니다. 이번에는 강성 문제도 크게 걱정 없도록 적당히 무식하게 만들었고, 공차 역시 고려해서 너무 꽉 끼는 문제가 없도록 했습니다. 결과가 잘 나올 것 같습니다. (괜찮을거야...아마....) 문제 없이 잘 나와야 할텐데 말이죠. 걱정은 되지만 이건 걱정한다고 더 잘 나오고 그런 영역이 아니니...그냥 잘 뽑히기만을 기다리는 수 밖에 없겠습니다. 모델링이 완료되니 갑자기 할 일이 없어지는데, 그동안 계획했던 대로 짐벌에 장착할 짐벌 관리 소프트웨어를 만들기로 했습니다. 사실 짐벌 관리 장치를 위한 공간은 모델링할 때 따로 고려하지 않았습니다. 소프트웨어는 있어도 그만, 없어도 그만이고 제작 과정에서 어떤 기능이 필요할지도 고민해보지 않았기 때문이죠..
![]()
storm32보드가 50*50(mm)나 되는 탓에..핸드헬드 형태를 유지하되, 보드를 포함할 수 있는 디자인을 고민해봤지만, 아무리 고민을 해 봐도, 마땅한 답이 나오지는 않았습니다. 상용 짐벌들은 이를 위해 보드를 재구성하지만, 제가 거기까지 기술력이 미치지도 못할 뿐더러, 한다고 해도 굉장한 노가다가 될 게 뻔하기에, 디자인을 어느정도 희생해야 될 것 같습니다.핸드헬드로 갔을때의 또다른 문제는, 부품들을 넣을 공간이 매우 부족하다는 것입니다. 핸드헬드 짐벌에서 부품이 장착되기 위한 공간, 부품을 고정시킬 수 있는 공간, 부품이 여유롭게 동작할 수 있는 공간을 확보하는 것은 매우 어려운 일입니다. 이는 지난 핸드헬드 형태의 모델링을 했을 때 뼈저리게 느낀 건데, 공간은 많은데 정작 제가 쓸 수 있는 공..